5. 領域抽出#
領域抽出は、大きくセマンティックセグメンテーション (semantic segmentation)、インスタンスセグメンテーション (instance segmentation)、およびパノプティックセグメンテーション (panoptic segmentation)に分類されます(Fig. 5.1)。それぞれの手法は、異なるタスクや応用に適しており、コンピュータビジョンの分野で広く利用されています。
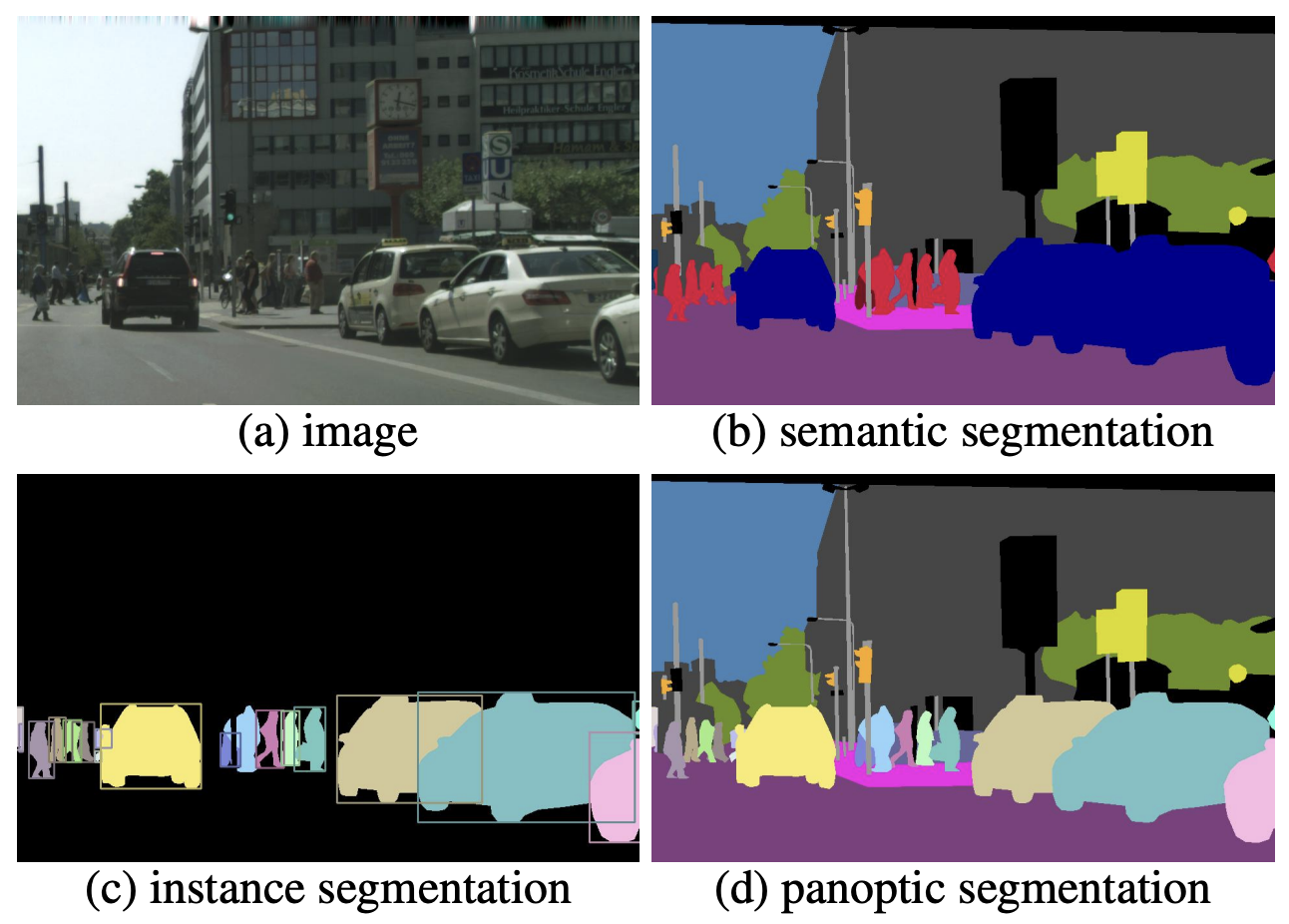
セマンティックセグメンテーションは、画像内のすべてのピクセルにクラスラベルを割り当てる手法です。たとえば、自動運転では道路、車線、歩行者、建物などをピクセル単位で認識する必要があるため、セマンティックセグメンテーションが活用されます。この技術は農業分野でも活躍しており、衛星画像やドローン映像を解析して農地、森林、河川などを分類する用途に使用されます。また、医療分野では MRI や CT スキャンの画像解析に応用され、臓器や病変部位の識別に役立っています。ただし、この手法では、同じクラスに属する個々オブジェクト(インスタンス、個体)を区別することはできません。例えば、車が 2 台重なっている場合、それがすべて「車」というクラスとしてまとめられます。
インスタンスセグメンテーションは、画像内の個々のオブジェクト(インスタンス)を識別し、それぞれのピクセル単位の境界を予測する手法です。例えば、車が 2 台重なっている場合、インスタンスセグメンテーションでは、それぞれの車を独立したインスタンスとして区別し、個別にセグメンテーションを行います。この特性は、ロボット工学での応用が顕著であり、ロボットアームが複数の物体を掴む際に物体を正確に識別する必要がある場面や、監視システムで特定の人物や物体を追跡する場合に活用されます。
パノプティックセグメンテーションは、セマンティックセグメンテーションとインスタンスセグメンテーションを統合した手法であり、画像内のすべてのピクセルをクラスラベルで分類しつつ、オブジェクトを個々のインスタンスごとに識別します。このアプローチは、背景とオブジェクトを包括的に理解するために非常に有用で、特に自動運転や AR/VR の分野で注目されています。たとえば、自動運転では車両や歩行者などの個別認識とともに、道路や信号といった環境全体の文脈を理解する必要があります。
Alexander Kirillov, Kaiming He, Ross Girshick, Carsten Rother, and Piotr Dollár. Panoptic segmentation. 2019. URL: https://arxiv.org/abs/1801.00868, arXiv:1801.00868.